Rájöttünk, mennyire más a világ békaperspektívából nézve: néha egy bokor fának, egy domb pedig hegynek tűnik, küzdöttünk a wifi-vel, de összességében nagyon hasznos volt a marokkói MARS2013 szimulációs terepgyakorlat, aminek tanulságait most egyik mérnökünk - Kerékgyártó Tamás - foglalta össze: A marokkói terepteszt nagyon jól összerázta a csapatot. Azok az emberek, akik eddig csak Skype beszélgetésekből és e-mailekből ismerték egymást, és távmunkában rakták össze a teljes rendszert, most végre személyesen együtt tapasztalhatták meg a rover kezelhetőségét, és próbálhatták ki azokat az eszközöket éles bevetésen, amiket együtt fejlesztettek ki. Nagyon sok tapasztalat gyűlt össze, melyeknek egy része siker, más része pedig tanulság, illetve fejlesztendő terület.
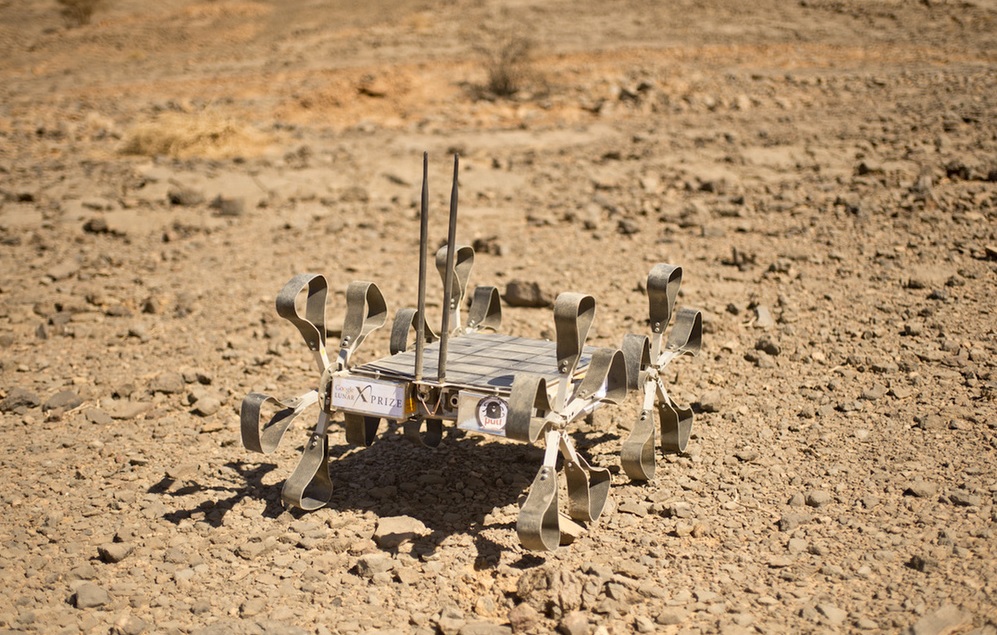
Fotó: (c) OeWF (Katja Zanella-Kux)
Nagy sikerként éltük meg a küldetésirányító csapat működését. Sikerült olyan struktúrát kialakítani, aminek segítségével gördülékenyen oldottuk meg a nem ritkán 10-12 órás, minden poszton folyamatos személyes jelenlétet igénylő műszakok lefedését. Küldetésirányító csapatunkból minden nap két műszak állt készenlétben, ezek másfél óránként váltották egymást. A csapattagok a leváltáskor vagy pihenőidőt kaptak, vagy kevesebb koncentrációt igénylő pozícióba kerültek. Minden műszakban volt egy tartalékos ember, aki bármely csapattag ideiglenes kiesése esetén be tudott ugrani a helyére addig, amíg az újra elérhető nem lesz – legyen szó pár perces egészségügyi szünetről vagy akár az ebédidőről. Ezen felül volt egy folyamatos, 24 órás ügyeletet ellátó csapatunk is, akik a rover töltöttségéért feleltek a töltési napokon, illetve ne feledkezzünk meg az útvonal-tervező csapatunkról sem: ők tervezték meg az egyes futási napok leendő útvonalát.
Szintén óriási siker számunkra, hogy a rover minden tervezett futási napon üzemképes volt! A marokkói terepteszt gyakorlatilag a harmadik volt holdjárónk földi prototípusának életében, de az első alkalom, amikor a robotot a távolból vezérelte a küldetésirányító csapat. Ráadásul eddig sohasem hagytuk mérnöki felügyelet nélkül a rovert, pláne nem ilyen hosszú időre: mindkét magyarországi futásunknál mérnökeink közül voltak páran a helyszínen – készen arra, hogy baj esetén segítsenek. Ezzel szemben a MARS2013 szimulációs terepteszt keretében 16 napon keresztül volt a roverünk külsősökre (nem Pulis csapattagokra) bízva; nekik nagyjából annyit kellett tudniuk, hogy a rover testén hol vannak azok a pontok, ahol sérülés nélkül megragadhatják a robotot a grabancánál fogva, ha szükség esetén arrébb kellene tenni. Két mérnökünk ugyanis február 8-án, két nap helyszíni rendszerellenőrzés után elhagyta Marokkót. Természetesen van min javítani: pont ezek megtalálása volt a teszt egyik célja.
A kommunikációs szoftverünkön már menet közben sokat javítottunk, ami elsősorban a felhasználói felületet tette átláthatóbbá.
A kommunikációs jel erősségével sajnos sokszor akadt gondunk, és menet közben az is kiderült, hogy a jelerősség erősen függött a rover helyétől (ezt a lengyel roverrel történt közös futás is megerősítette), így a jel erőssége mozgás közben folyamatosan változott – hol előnyünkre, hol hátrányunkra – ugyanakkor pár méterrel a felszín felett a szkafanderes szimulációk során általában jól működött. El is érkeztünk az első olyan ponthoz, ahol a problémát nem az okozta, hogy egyik vagy másik rendszer rosszul üzemelt volna, hanem az, hogy az osztrákok rendszere 2 méteres magasságban lévő szkafanderes vevőantennára volt kitalálva, nem pedig egy néhány 10 cm-es magasságban lévőre, amit a rover is használ. Robotunk jelenleg kétféleképpen képes kommunikálni az irányítóközponttal: egy, a terepen lévő helyi wifi-hálózat segítségével - ehhez természetesen kell egy reléállomás is - vagy GPRS/EDGE/3G modemes kapcsolaton keresztül. A wifi jelerősség a fentiek miatt sajnos sokszor gyengébb volt a vártnál, és sok olyan hely volt, ahol egyszerűen eltűnt, és ha wifi-lyukra futottunk (ld. korábbi cikkünket), akkor onnan már nincs se előre, se hátra. Ott már csak az ÖWF tud segíteni manuális áthelyezéssel. Mivel sivatagi körülmények között nehéz mobiltelefonos átjátszóállomást találni, a modemes kommunikációs opciót már itthon elvetettük, ráadásul a Telenoros támogatás december még csak egy volt a tervek között. A gyenge mobiltelefonos jelerősséget kinti mérnökeink később meg is erősítették: ha itt-ott volt is terepen, de akkor is csak nagyon gyengén.
Sokat segített volna, ha van már egy kész, működő leszállóegység-modellünk (lander). A tervek szerint a lander képes kapcsolatot teremteni az irányítóközponttal, fotókat készíteni és tartani a kapcsolatot a roverrel. A fentiekből következik, hogy ha a landert betettük volna egy olyan fix pontba, ahol megfelelő a wifi-jelerősség, akkor gond nélkül kolbászolhattunk volna a roverrel a környéken egy saját,már előre letesztelt, megbízható lander-rover közti wifi-összeköttetésen keresztül.

Mindemellett azért mindennap sikerült hol többet, hol kevesebbet futni a robotunkkal. A sivatagban rovert vezetni teljesen más, mint egy bányában igazgatni az útját a helyszínen. Tájékozódni gyakorlatilag csak a képek alapján tudunk, az égtájat is sokszor a kövek árnyékából, illetve a nap helyzetéből állapítottuk meg, de néhány távolabbi hegy vagy bokor is segítségünkre volt. A terep teljesen másképp fest békaperspektívából, mint mondjuk embermagasságból. Valahogy minden közelebbinek és nagyobbnak tűnik, mint egyébként. Előfordult, hogy egy bokrot fának, vagy egy dombot hegynek néztünk. :_) A tájékozódásunkat nagyban segítette az a munka, amit a két mérnökünk végzett a két napos rendszerellenőrzés során, amikor segítettek megbecsülni a fotókon látható tárgyak távolságát sík terepen, így létrehozva egy standard rasztert – ezt a képekre ráhúzva, könnyebben tudtunk távolságokat megbecsülni, igaz, csak 4-5 méterig. Arra viszont elég volt, hogy ne menjünk neki egy-egy nagyobb kőnek, ha azok közel vannak hozzánk.
Összességében nagyon jó tapasztalat volt a MARS2013, és megerősített minket abban, hogy jó úton járunk az űrképes konstrukció fejlesztésében. Ezúton is nagy-nagy köszönetet mondunk az osztrák ÖWF-nek a szervezésért, és a folyamatos segítségért. Szponzoraink és támogatóink nélkül nem jött volna össze!
A Puli Space MARS2013 küldetésének ezüstfokozatú támogatója a HungaroControl Magyar Légiforgalmi Szolgálat Zrt.
A HungaroControl légiforgalmi irányítói évente közel 600 ezer repülőgép biztonságos közlekedéséről gondoskodnak hazánk légterében, valamint a Budapest Liszt Ferenc Nemzetközi Repülőtéren. A HungaroControl világszínvonalú technológiája, élenjáró fejlesztései és szolgáltatásai révén a nemzetközi légiforgalmi irányítás egyik legpontosabb, leghatékonyabb és legmegbízhatóbb szolgáltatója.

A Telenor Magyarország Zrt. pedig telekommunikációs eszközökkel sietett a csapat segítségére. Ezek közül különösen a két laptop és az 5 db LTE szélessávú mobil internet kulcsfontosságú, mivel a két laptopot a küldetésigazgató és a rover irányítója használja. A vezetékes Internet vagy áramkimaradás esetén (esetleg vészhelyzetben pl. tűz) az LTE kapcsolat segítségével sem szakad meg a kapcsolat az irányítás és a robot között.
![]()
![]()